
Нет, кинематограф здесь ни при чем. Во время военных действий нет машины менее толковой и надежной, чем человекообразный робот. Невысокая устойчивость и скорость, хрупкость, ограничения по массе машины и полезной нагрузки — все это не позволяет претворить в реальность фильм Гильермо дель Торо. В частности, гусеницы эффективнее ног, а органы «зрения» и процессор гораздо проще и безопаснее разместить в защищенной части машины, а не в открытой противнику голове.
Соревнования человекообразных роботов
DARPA, агентство по перспективным оборонным научно-исследовательским разработкам США, регулярно становится источником технологических новостей – управляемые пули, фотонная нервная система, экзоскелеты... Но в последнее время все новости DARPA посвящены единственной теме – человекообразным роботам. Почему? Неужели это новый тренд, возникший под влиянием фильма «Тихоокеанский рубеж»?
Но нельзя забывать, что DARPA занимается не только военными технологиями. Значительная часть концептов, выходящих из лабораторий агентства, используется в мирной жизни. Исследование человекообразных роботов направлено в первую очередь на создание машин, способных работать в условиях, в которых человек находиться не может, и при этом использовать человеческие инструменты и созданную для человека среду. Представьте себе ситуацию: происходит пожар или, скажем, авария на атомной станции. Нужно срочно спасать людей, оставшихся под завалами или запертых в задымленных помещениях. Для этого нужно не просто отбрасывать в сторону камни и плиты, но иногда открывать двери, выключать приборы, подниматься по лестницам — в общем, выполнять множество задач, которые обычному роботу не под силу, если он не создан специально для этого. Человекообразный робот должен уметь взять из ящика пожарный топор и прорубить дверь, если это необходимо, или быстро сбежать по лестнице вниз, держа на руках ребенка. Все это — сложнейшие технологические задачи, ведущие к прямому применению человекообразных роботов.
Выше, быстрее, сильнее
При всех мощностях DARPA самостоятельная разработка сильно ограничила бы спектр возможных технических решений, и агентство пошло по давно проверенному и доказавшему свою состоятельность пути. Оно объявило конкурс-соревнование DARPA Robotics Challenge (DRC) — известно, что частные команды ради приза в виде контракта готовы сотворить чудеса. Даже те, чьи роботы занимают на подобных конкурсах последние места, в накладе не остаются. В итоге в декабре 2013 года на «наскаровском» автодроме в Хоумстеде прошло двухдневное шоу-соревнование роботов, собравшее сотни зрителей и выявившее преимущества и недостатки различных конструкций. По итогам восемь лучших команд получили гранты по миллиону долларов для продолжения исследований. В июне были предварительные состязания, в которых принимало участие более трех десятков команд — в хоумстедский финал вышло семнадцать.

Роботов, принимавших участие в DARPA Robotics Challenge, можно разделить на две основные группы. Первая группа (А/D) состояла из команд, которые и самостоятельно построили своих роботов, и разработали к ним софт. Другая группа (B/C) роботов не строила, а создавала софт для уже зарекомендовавшего себя робота Atlas, сконструированного компанией Boston Dynamics.
Соревнования выиграла единственная неамериканская команда — японцы из SCHAFT Inc. с роботом S-One собственной постройки. Вообще в заветную восьмерку попали три команды из группы A и пять из группы B, то есть работавших только с софтом. Интересно, что широко разрекламированный робот Valkyrie, созданный NASA (да, NASA участвовало в конкурсе наравне с малыми командами!), с треском провалился и занял предпоследнее место.

Особые способности
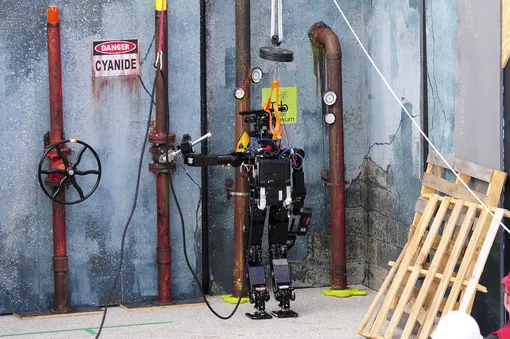
Как уже говорилось, основная задача человекообразного робота — это уметь работать с инструментами и интерфейсом, предназначенными для человека. Поэтому все задания на соревнованиях имитировали простые, но типичные ситуации, с которыми спасателям-людям приходится сталкиваться во время ликвидации той или иной аварии. В частности, за одну из моделей взяли печально известную «Фукусиму».
Первым делом до места аварии нужно добраться, и потому заданием номер один стало вождение автомобиля (точнее, большого квадроцикла Polaris Ranger XP 900) по короткому треку-змейке с пятью изгибами. Причем за преодоление дистанции робот получал всего одно очко — второе присуждалось за то, что он самостоятельно выйдет из машины и пройдет пешком еще несколько метров.

Задания DARPA Robotics Challenge 2013
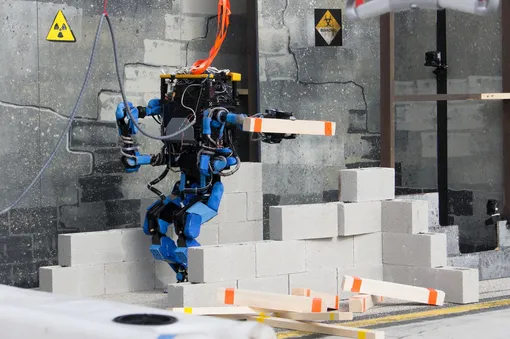
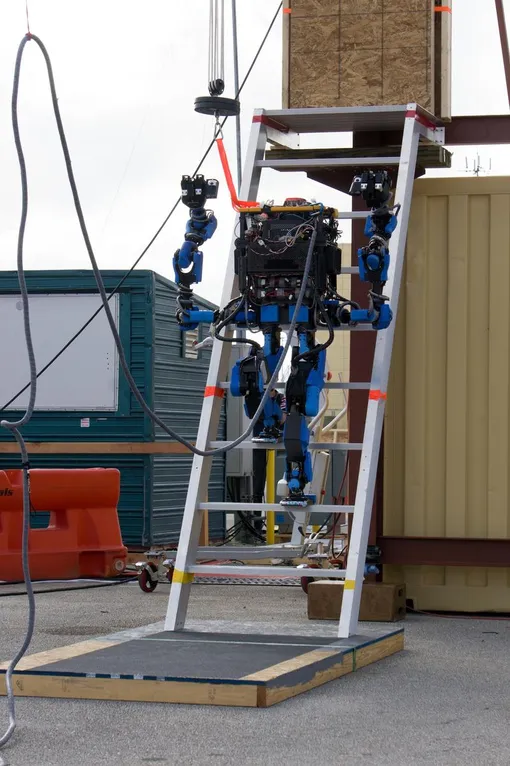
Вторым заданием стало преодоление неровной поверхности — препятствий различного профиля, собранных из бетонных блоков. Человек пробегает по таким за несколько секунд. Похожим было и третье задание — лестница. Тут надо отметить, что поблажек для роботов еще очень и очень много. Например, команды могли выбирать удобную для себя крутизну лестницы (60 или 75°), количество и конфигурацию перил — а ведь в реальных условиях такого выбора не будет.
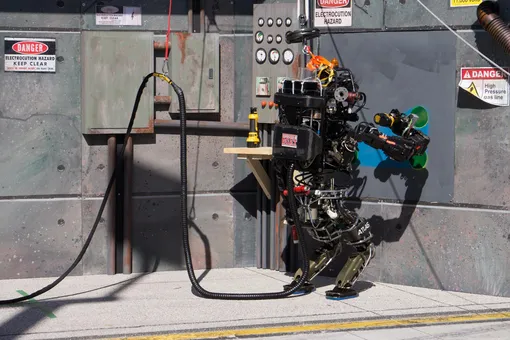
Группа заданий с четвертого по шестое посвящалась преодолению преград. Сперва роботы должны были разобрать завал перед дверью и войти. Дальше их ждали еще несколько дверей — открывающиеся внутрь и наружу; задача стояла в распознавании типа и выборе правильных действий (толкнуть или взять за ручку и потянуть). А в шестом задании организаторы поставили бетонную стену, в которой роботы должны были высверлить несколько отверстий с помощью обычной ручной дрели и извлечь освободившийся треугольный сегмент.
| Команда | SCHAFT Inc. | Tartan Rescue | Jet Propulsion Labs | Team THOR | Drexel University | NASA JSC Team |
| Страна | Япония | США | США | США — Южная Корея | США | США |
| Робот | S-One | CHIMP | RoboSimian | THOR-OP | DRC-Hubo | Valkyrie |
| Высота, мм | 1480 | 1575 | 1640 | 1780 | 1400 | 1880 |
| Масса, кг | 95 | 181 | 108 | 65 | 60 | 130 |
| Размах рук, мм | 1309 | 3048 | 2210 | 2080 | 2040 | 2032 |
| Базовый облик | Робот HRP-2 (человек) | Шимпанзе | Шимпанзе | Человек | Человек | Человек |
| Место (очки) | 1 (27) | 3 (18) | 5 (14) | 9 (8) | 13 (3) | 15 (0) |
И лишь после этого можно было приступать к спасению: в седьмом задании роботы перекрывали открытые вентили различных диаметров, а в восьмом — разматывали брандспойт и подсоединяли его к системе пожаротушения.
Но тут надо отметить, что на словах все вышесказанное звучит достаточно громко. На самом же деле даже победитель в каждом из зачетов справлялся с заданиями медленно, тяжело, нередко с помощью ассистентов, поправлявших элементы обстановки, неудачно задетые или опрокинутые роботом. Судите сами: прохождение дистанции в пару десятков метров на квадроциклах у шести команд группы A заняло более девяти (!) часов. Это значит, что большая часть исследований еще впереди.

Анатомия робота
Японцы SCHAFT Inc. для своего S-One использовали существующую базу — робота HRP-2. Робот получился «средней человекоподобности»: он очень приземистый (1480 мм) и широкоплечий (1309 мм), при этом его масса вполне человеческая — 95 кг. В целом робот напоминает неуклюжего карлика — но такая конфигурация позволила одержать победу над целым рядом более гуманоидных конструкций.

Типовая модель
Но еще более оригинальным образом к вопросу подошли специалисты из питтсбургского университета Карнеги-Меллон. За основу формы робота CHIMP они взяли не человека, а... шимпанзе. Робот получился почти такой же низкий, как и у японцев, — 1575 мм, но значительно более тяжелый — 181 кг. Коренное отличие лежит в конструкции ног: у CHIMP вместо обычных ступней — небольшие обрезиненные гусеницы. Это позволяет ему передвигаться по пересеченной местности, не шагая, а подобно танку, но при этом он способен подниматься по лестнице, застопорив траки и перемещая собственно ноги. Аналогичные гусеницы встроены в «локти», то есть при необходимости «шимпанзе» может передвигаться и на четвереньках. Тем не менее в общем зачете питтсбургцы заняли лишь третье место.
Третий робот самостоятельной постройки, попавший в финал (пятое место), — это RoboSimian, творение калифорнийской команды Jet Propulsion Labs. Больше всего, если честно, он напоминает лягушку, хотя создатели настаивают на сходстве с обезьяной. У RoboSimian четыре абсолютно симметричные конечности, которые могут служить и руками, и ногами в зависимости от необходимости; у каждой 28 степеней свободы. Кстати, в отличие от человека, у роботов значительно больше «глаз» и датчиков — тот же CHIMP имеет угол обзора 360°.
Рассматривая наиболее успешные конструкции, можно сделать вывод, что единого «рецепта» идеального робота-спасателя не существует. Каждое из решений имеет свои преимущества и недостатки. Причем кроются они не только в механической составляющей, но и в программном коде. Интересно смотреть, как SCHAFT преодолевает, например, лестницу. Движения у него достаточно быстрые — не медленнее человеческих. Но перед каждым движением, перед каждой ступенькой он замирает на 30−60 секунд, необходимых для расчета следующего действия. В результате девятиступенчатая лестница занимает у робота более восьми минут. Большую часть времени современные роботы теряют именно на распознавании предметов и понимании, что с ними следует делать. Проще говоря, проблема в голове. Поэтому и существует отдельный зачет команд, которые пишут софт под стандартного робота Atlas, и в первой восьмерке эти команды заняли целых пять мест, обойдя тех, кто «распылялся» и на софт, и на «железо».
Исследования, финансируемые DARPA, нужны и важны. Другое дело, что человечество находится на очень ранней стадии роботостроения. Человекоподобные спасатели заменят своих создателей в реальном деле не сегодня, не завтра, а лет через десять-двадцать, если не больше. Задача DARPA — создавать конкуренцию и подстегивать технологии, чтобы не стояли на месте. Неизвестно, кто из разработчиков в итоге соберет настоящего робоспасателя — может, к тому моменту ни одной из фирм-участников соревнования уже не будет на плаву, — но Robotics Challenge позволяет уверенно сказать: рано или поздно это случится.