Четвероногие помощники: как устроены робособаки, которых используют в строительстве и космонавтике


Лет десять назад в интернете «завирусились» видеоролики, в которых разработчики Boston Dynamics безжалостно пинали, толкали и роняли своих робособак. В комментариях зрители возмущались столь бесчеловечным обращением со «зверюшками» и посмеивались над неловкостью движений прототипов AlphaDog и BigDog. Но прошло время, и вот уже стартап, основанный выпускниками Массачусетского технологического института, продает контрольный пакет (80%) своих акций концерну Hyundai почти за миллиард долларов, а модель Spot Gamma используется крупнейшими корпорациями мира. Робособаки инспектируют нефтяные платформы в море, большие стройки на суше и частный космодром компании SpaceXв Техасе.
Такому успеху во многом способствовало именно «жестокое обращение». Конечно, Spot – настоящее произведение технического искусства, и многое в роботе зависит от сложной электроники и нейросетей, машинного зрения, цифровых 3D-моделей собственного тела и окружающего пространства. Но в основе робособаки лежит продуманная до деталей конструкция. Благодаря ей Spot легко справляется с препятствиями и лестницами, выдерживает падение с высоты нескольких метров, а оказавшись на боку или даже на спине, поджимает конечности, поднимается и продолжает работу как ни в чем не бывало.
Ноги
Прежде всего обращают на себя внимание ноги робособаки: все четыре ее колена сгибаются назад. Примерно такое решение нашла когда-то и эволюция. У настоящих собак роль колена выполняют заплюсневые (скакательные) суставы, на которые приходится основная нагрузка при беге, и сгибаются они тоже назад, давая импульс вперед при каждом шаге. Такая конструкция помогает распределить нагрузку между обоими суставами, коленным и бедренным. Если бы колени Spot сгибались вперед, основную часть работы пришлось бы выполнять только одному суставу – верхнему.
Кроме того, благодаря сгибающимся назад коленям робот способен взбираться по наклонной поверхности и ступенькам, не упираясь в них ногами. Правда, при спуске такая анатомия создает проблемы. С этим сталкиваются и реальные собаки, которые сбегают по лестнице далеко не так уверенно, как поднимаются. Разработчики Spot решили не заморачиваться с поиском решения: при необходимости робопес просто разворачивается и спускается спиной вперед – так, чтобы его колени по-прежнему сгибались в свободном переднем направлении. Ориентацию в пространстве машина, в отличие от живой собаки, при этом не теряет: у нее сзади есть пара глаз-камер.

Мышцы
Каждым суставом робота управляет отдельный электродвигатель, который играет роль сразу двух мышц – сгибателя и разгибателя. Верхний, бедренный двигатель утоплен в корпусе и связан с бедром планетарной передачей, благодаря которой он напрямую вращает свой сустав, отклоняя его на угол до ±91 градуса от вертикали. Нижний двигатель, манипулирующий голенью, расположен не в колене, а тут же, возле бедренного. Это позволяет уменьшить массу ноги, которую приходится поднимать при каждом шаге. А с голенью его связывает винтовая передача, проходящая через все бедро. Она напоминает длинный винт с гайкой, зажатой между пальцами: вращение двигателя заставляет гайку ползти по резьбе, перемещаясь вперед или назад. Благодаря этому вращательное движение переходит в линейное, позволяя сгибать или разгибать коленный сустав.
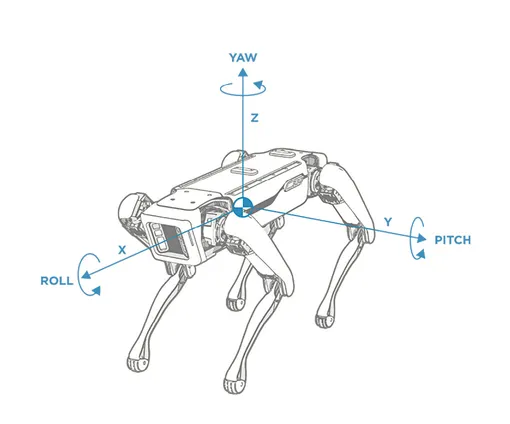
Но бедренный двигатель не только заставляет ногу ходить вперед-назад, но и сам может разворачиваться за счет связанного с ним третьего двигателя в теле Spot. Его ось параллельна телу робопса и позволяет разводить конечности в стороны на 45 градусов, чтобы принять устойчивую позу. Такое положение можно заметить на видео в моменты, когда машина пытается устоять при боковых ударах по корпусу и отводит противоположную пару ног подальше от тела. Если же это не помогает и робот все-таки падает, третьи двигатели позволяют ему встать на ноги. Они разворачивают пару конечностей с одной стороны так, чтобы упереться ими в землю и, разгибая суставы, встать.

Нервы и кости
Для уменьшения массы и инерции конечностей их «кости» сделаны из тонких, легких и прочных углепластиковых балок. И конечно, каждый сустав снабжен «нервным узлом» – датчиками, которые непрерывно отслеживают нагрузку и угол сгибания. Датчики связаны с управляющей системой, которая координирует работу всех восьми двигателей. Здесь уже вступают в дело нейросети, обученные выбирать такие углы сгибания суставов, при которых Spot сохраняет вертикальное положение и двигается вперед по поверхности с разными препятствиями и уклонами.
Коленный сустав связан со своим двигателем с помощью винтовой передачи бедренный – через планетарную передачу.
Система умеет использовать два варианта походки. «Рысца» с одновременным перемещением пары противоположных конечностей – то передней правой и задней левой, то передней левой и задней правой, – подходит для сравнительно быстрого бега. «Ползание», при котором в каждый момент робот стоит не менее чем на трех ногах, перемещая лишь четвертую, – для медленного движения по особо сложной пересеченной местности. За походку полностью отвечает электроника. Но без сложной инженерной анатомии, без его «костей» и «мускулов» эти 3D-модели и нейросети не имели бы никакого значения.
